UDMlc
2, 4 drives, 12-48V, up to 5/10A EtherCAT ® Dual/Quad Axis Drive Module
- Universal dual/quad axis Drive Modules for EtherCAT networks
-12Vdc to 48Vdc, up to 5A continuous and 10A peak current
-Digital control for easy setup and diagnostics
- Universal drive, supporting any of the following type of motors by software settings only: 2, 3 phase AC Servo / DC brushless with sinusoidal commutation, DC Brush, voice coils, closed and open loop step motors
- Feedback
-4 digital incremental encoders
-2 absolute encoders (optional)
- Digital I/O (all can be used as general purpose I/O):
- Inputs: 4 Registration Mark
-Outputs: 1 PEG, 4 motor brake (24V, 0.5A)
- Compact footprint: 100x75x48 mm3
|
 |
|
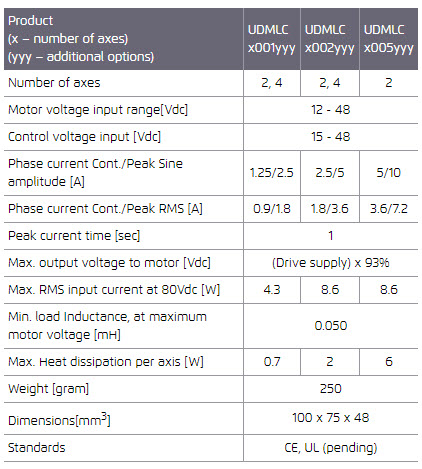
The UDMLC is a series of small footprint EtherCAT modules with dual/ quad-axis universal drives for servo, stepper, and voice coil motors with a power range of 10W to 200W. The type of motor is selected by the user and can be set differently for each drive.
This product addresses the needs of demanding multi-axis motion applications with limited space, such as moving inspection heads, small manipulators, and table-top motion stages. The miniature size, low weight, and minimal cable interface makes the SPiiPlusUDMLC ideal for mounting remotely on moving axes. It is available in three current levels (cont./peak per axis): 1.25/2.5A, 2.5/5A or 5/10A (dual axis version only), and has inputs for four digital incremental and two absolute encoders.
The unit is powered by a 12 to 48Vdc motor bus voltage supply and by a separate 15 to 48Vdc control supply that keeps all logic signals alive during emergency conditions. The UDMLC is panel or din rail mountable.

Servo A standard comprehensive set of powerful algorithms to enhance accuracy, move & settle time, smooth velocity, stability and robustness.
- Advanced PIV cascaded structure
- Loop shaping filters
- Gain Scheduling
- Gantry MIMO control (2.5/5model only)
- Dual feedback / loop control
- Disturbance rejection control
Optional Servoboost® algorithem that provides better, more consistent servo performance, insensitive to noise and large changes in the system.
Drives
Type: digital current control with field oriented control and space vector modulation.
Current ripple frequency: 40 kHz. Current loop sampling rate: 20 kHz.
Programmable Current loop bandwidth: up to 4kHz, will vary with tuning & load parameters.
Commutation type: sinusoidal. Initiation with and without hall sensors.
Switching method: advanced unipolar PWM.
Protection: Over voltage, Motor Phase-to-phase short circuit, motor phase to ground,
short circuit, Over-current, Over-temperature.
Accessories
UDMlc-ACC1 – A set of mating connectors
UDMlc-ACC2 – A set of 50cm cables with assembled mating connectors
UDMlc-ACC3 - Din-rail mounting kit
Supplies
Range: 12Vdc to 48Vdc
Current rating should be calculated based on actual load.
Control supply
Range: 15Vdc to 48Vdc
Maximum input power: 15W
Input current: < 1A
Motor Type
Universal drive, supporting any of the following type of motors by software
settings only:
Two- and three-phase permanent magnet synchronous (DC brushless/AC servo), DC brush, Voice coil, Two- and three-phase stepper (micro-stepping open or closed loop), Five-phase stepper*. (*Consult ACS)
Feedback
Types: incremental digital encoders, optional: absolute encoders
Incremental Digital Encoder: Four, one per axis. A&B,I and Clk/Dir,
Type: Differential RS-422 or single-ended
Max. rate: RS-422 - 50M quad counts/sec, Single-ended: 2M quad counts/sec.
Protection: Encoder error, not connected
Absolute encoders (optional): Total of two. Endat 2.1/ 2.2, Panasonic, SmartABS, SSI and BiSS-A/B/C .
Hall inputs: Four, a set of three per axis. Type: single-ended, 5V, source, opto-isolated.
Input current: <7mA.
5V feedback supply: Feedback devices are fed by a 5V±5% supply.
Total available current to all encoders is 1A
Digital I/O
Safety Inputs: Left and right limit inputs per axis.
Type: Single-ended, 24V±20%,opto isolated, source
E-Stop: 24V, Max., opto isolated, two terminal, input current 4-14mA
Registration Mark: Four. Fast, 24V±5%, opto-isolated, two terminals. Can be configured
as ‘sink’ or ‘source’. 4-10mA input current. can be used as general purpose fast inputs.
Motor Brake Outputs: Four, opto-isolated, 24V±20%, 0.5A per output. Can be used as
general purpose outputs.
Position Compare Outputs (PEG): One, RS422. Can be used as general purpose output.
Pulse width 26nSec to 1.75mSec
Maximum rate with RS422 outputs: 10MHz.
SPI Interface: One. requires customized software to activate. Consult company.
Environment
Operating range: 0 to + 50°C
Storage and transportation range: -25 to +70°C
Humidity (operating range): 5% to 90% non-condensing
Communication
Two EtherCAT ports, In and Out
Specifications
|
